HUB-OMT 感測模組
產品說明
|
HUB-OMT PAA3905 是由影像擷取來感知位置的移動,在使用方面設定好內部參數, |
|
📝 說明書: HUB-OMT_位置移動感測說明書_v1.pdf 下載
產品應用
MPU6050 的角度與加速度資訊可與 PAA3905 的 XY 位移資料互補,廣泛應用於機器人、無人機、手勢偵測與運動分析中。以下為一簡單範例:
角度: angleX, angleY, angleZ (單位:度) 加速度: accX, accY, accZ (單位:g) 應用整合: - 若 angleX > 15 度,代表裝置正在傾斜 - 若 accZ < 0.5g,代表可能處於自由落體狀態 - 可結合 Dx/Dy 資料進行 2D 移動與姿態同步分析
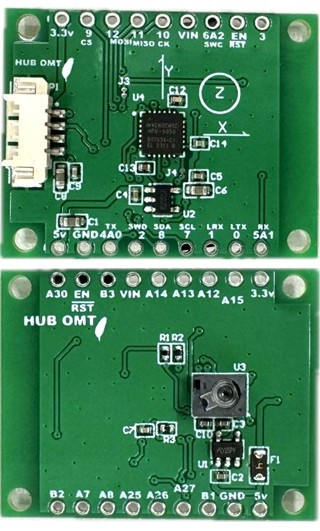
模組介紹與腳位說明
HUB-OMT 是由 PAA3906 光學動態追蹤感測器與 MPU6050 三軸加速度與陀螺儀模組所組成。
利用 SPI 與 I2C 與主控板(如 HUB5168+)連接,實現 XY 平面位移感知與三軸姿態角度/加速度量測功能。
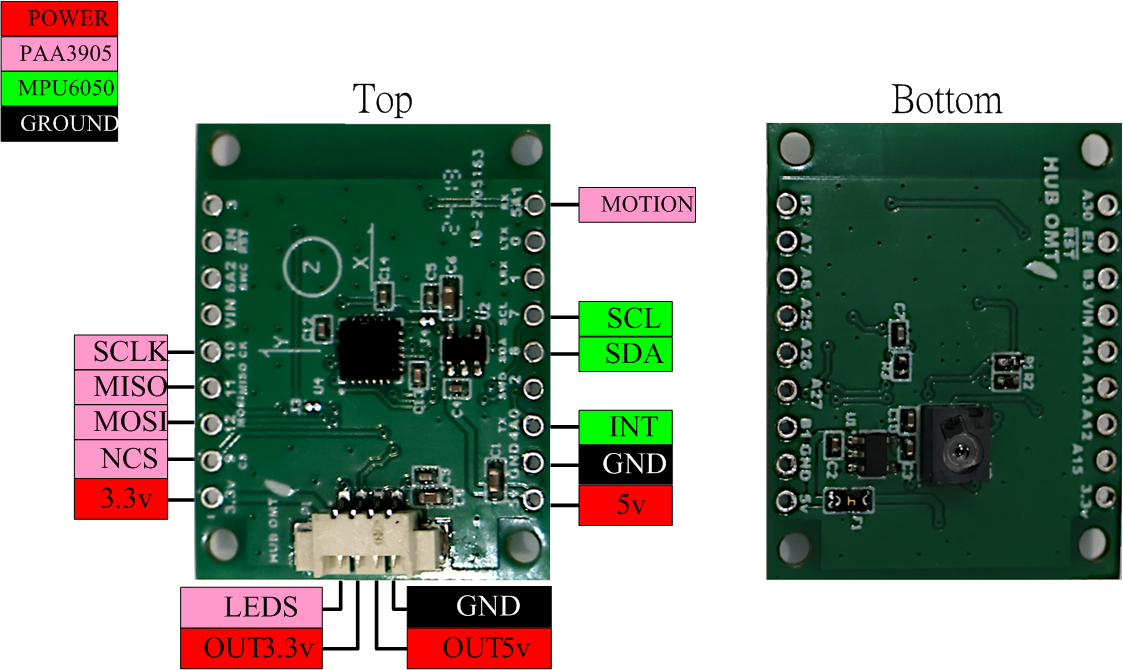
- SPI 接口 (PAA3906):SCLK、MISO、MOSI、NCS
- I2C 接口 (MPU6050):SCL、SDA
- 其他腳位:MOTION(移動偵測)、INT(中斷輸出)、3.3V、5V、GND
- 照明 LED 控制:LEDS 同步訊號腳
HUB-OMT 主要腳位圖:
系統架構與連接方式
HUB-OMT 可直接堆疊在 HUB5168+ 開發板上,或使用排線連接 SPI/I2C 腳位:
- 3.3V 與 GND 為電源與地
- SPI 連接 PAA3906:NCS、MOSI、MISO、SCLK
- I2C 連接 MPU6050:SCL、SDA、INT
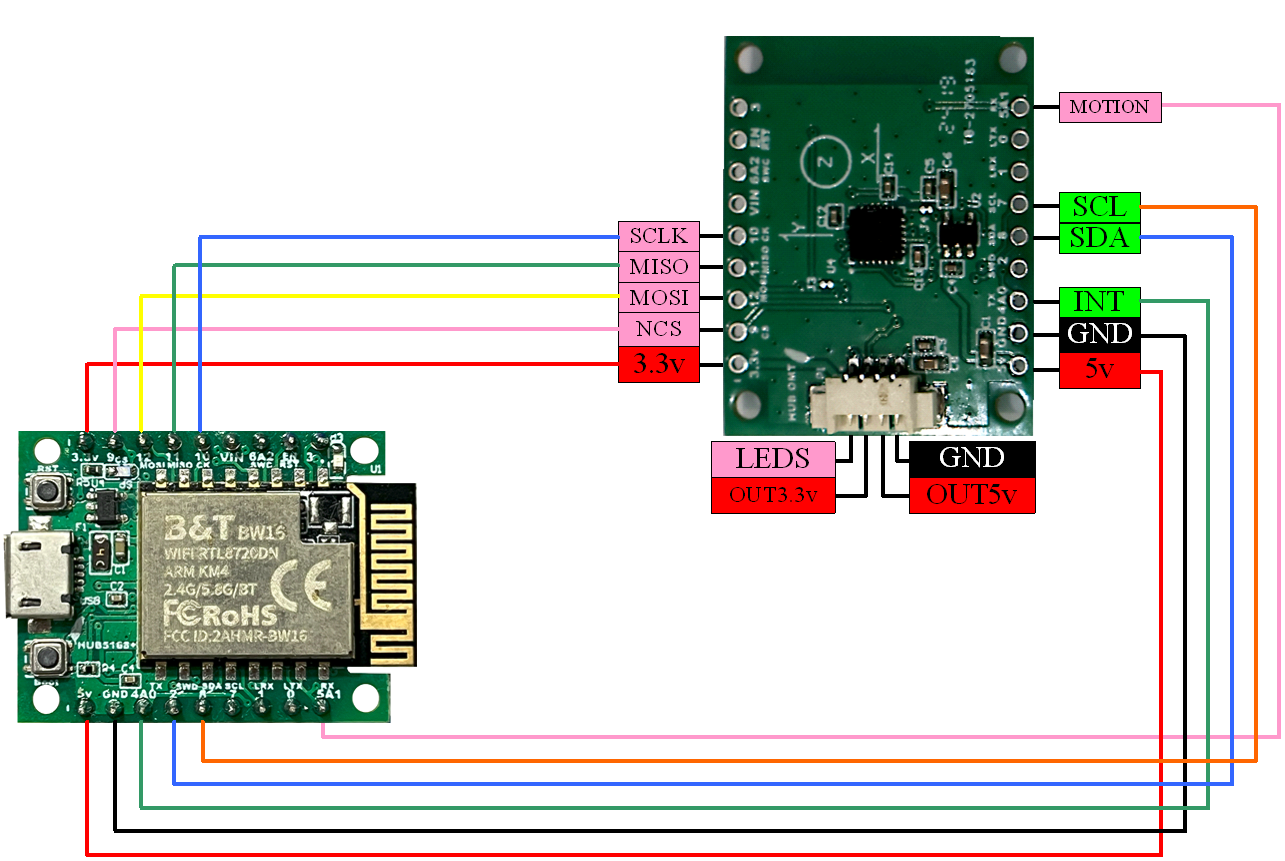 HUB-OMT 與 HUB5168+ 連線圖 |
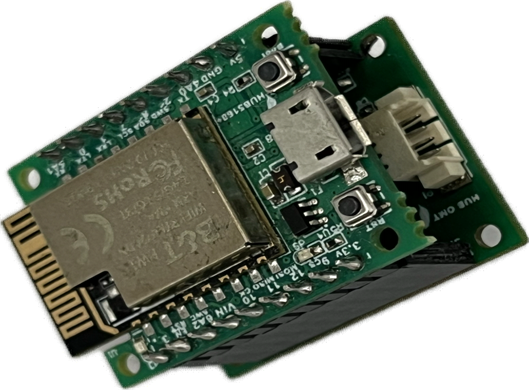 HUB-OMT 與 HUB5168+ 相疊圖 |
MPU6050 感測器簡介
MPU6050 是 InvenSense 所推出的 6 軸 IMU 感測器,內建三軸加速度計與三軸陀螺儀,廣泛應用於姿態偵測與移動追蹤:
- 內建三軸加速度與三軸陀螺儀
- I2C 通訊介面,最大支援 400kHz
- 加速度範圍:±2g、±4g、±8g、±16g
- 陀螺儀範圍:±250、±500、±1000、±2000 deg/s
- 可計算姿態角(Pitch、Roll、Yaw)與加速度量測
PAA3906 感測器簡介
PAA3906 是 PixArt 推出的低功耗、高準度 2D 動態追蹤感測器,常用於滑鼠與機器人位移感知:
- SPI 傳輸介面,最高支援 2MHz
- XY 軸每次輸出為有號 8bit
- 支援 motion burst 模式
- 內建 surface quality (SQUAL) 與 shutter time
- 光學模組建議安裝距離為 2mm
即時感測數據
AngleX: 0.0, AngleY: 0.0, AngleZ: 0.0
AccX: 0.0, AccY: 0.0, AccZ: 0.0
Squal: 0, Shutter: 0
Arduino 範例程式碼
// 初始化感測器
mpu.begin(); // 啟用 MPU6050
paa.begin(); // 啟用 PAA3906
// 每 100ms 讀取資料
if (millis() - timer > 100) {
int dx, dy;
paa.readMotion(&dx, &dy); // 位移
mpu.update(); // 姿態與加速度
// 讀取快門與表面品質
uint8_t sql;
uint32_t sht;
paa.getSqualShutter(&sql, &sht);
}
設計參考資料